Sample laboratories¶
This section presents the a set of sample laboratories available in the University of Deusto.
Note
The terms laboratory, experiment or rig are a common problem in the remote laboratories literature. We will use laboratory or experiment identically in this document. But take into account that in the case of the CPLD there is a single laboratory but there are two copies (commonly called rigs) of them, and students are balanced among them. But on the Robot laboratory, there are three different laboratories running on the same single rig. This way, WebLab-Deusto separates resources (rigs) from laboratories.
Table of Contents
FPGA¶
ud-fpga lets you remotely practise with a Field Programmable Gate Array. Through the Xilinx software, you can write a FPGA program locally as you normally would. Once the program is compiled, and ready to be tested, you should simply upload the binary “.bit” file through the experiment.
ud-fpga will automatically program the FPGA board with the binary you provided, and start running it. To see the results, a Webcam is of course provided. You may also interact with the board remotely, by using the provided widgets. Though the widgets themselves might appear artificial, they will send a signal to the board just like their physical counterparts would.
However, due to certain safety concerns, in the demo version you can’t upload your own file for this demo. Instead, a specific demo program (which has already been uploaded) will be used. Everything else will work as in the standard FPGA experiment.
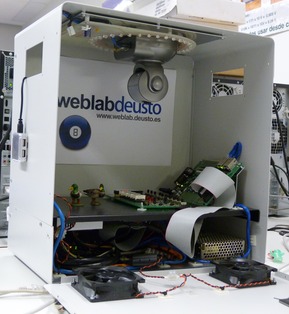
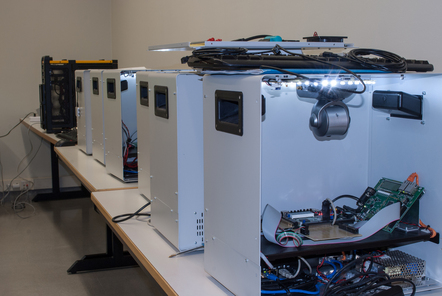
The FPGA laboratory, as other WebLab-Deusto laboratories (PIC or CPLD), is developed within the WebLab-Box. On the WebLab-Box, the device, as well as a fit-pc, a PIC microcontroller, a camera, lighting system and networking materials is installed, so as to make it easier to create and deploy new laboratories.
- Target audience: Electronics Engineering students.
CPLD¶
ud-demo-pld lets you remotely practise with a Programmable Logic Device.
With the standard PLD experiment, through the Xilinx software you can write a PLD program locally as you normally would. Once the program is compiled, and ready to be tested, you can simply upload the binary “.jed” file, and it will be programmed on the physical board and run.
However, due to certain safety concerns, you can’t upload your own file for this demo. Instead, a specific demo program (which has already been uploaded) will be used. Everything else will work as in the standard FPGA experiment.
That binary file will be automatically programmed into the board, and it will start running. To see the results, a Webcam is provided. You may also interact with the board remotely, by using the provided widgets. Though the widgets themselves might appear artificial, they will send a signal to the board just like their physical counterparts would.
As the FPGA, the CPLD laboratory is running in the WebLab-Box. However, two different laboratories are available. The queue of students is balanced between both copies, so it goes twice faster.

- Target audience: Electronics Engineering students.
- Video: http://www.youtube.com/watch?v=zON7oYtssrw
Aquarium¶
The aquarium laboratory creates an access to a real aquarium located in the University of Deusto. On it, it is possible to feed the fish, turn on and off the lights, and, if the submarine is in the water and it is charged, control the submarine. The problem is that most of the time, the submarine is out of battery so we only put it in the fishtank certain days.
Regarding feeding the fish, it may seem dangerous, but it is not. The system feeds them automatically three times a day, every 8 hour. If a user feeds them, then it does not let any other user to feed them before the next shift, guaranteeing that they are only fed three times. So go ahead and try it!
The initial rationale behind this laboratory is that groups of primary school students are responsible of the life of these fish (even if they are not under a real danger). Teachers may know which groups of students have feed them correctly, which students didn’t forget and which students coordinated correctly so no one overfed the fish.
However, at the time of this writing ongoing work is being done for adding more sensors to this laboratory, so stay tuned ;-)
From a technical perspective, the whole laboratory is deployed in http://fishtank.weblab.deusto.es/, which uses a low cost ARM microprocessor called IGEPv2. So basically it is an example of federated system.

- Target audience: initially, primary school students. Right now the focus is changing to take into account physics principles with sensors.
Robot¶
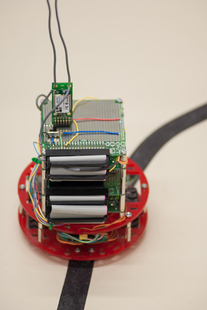
The robot laboratory uses the commercial robot Azkar-bot, with an attached microcontroller. WebLab-Deusto manages to establish that three different learning activities are using the same equipment, so the scheduling system will queue other users internally.
robot-proglist¶
robot-proglist lets you choose one among a few of predefined programs to program the bot with.
The programs currently available are the following:
Follow black line
The robot will first move randomly while avoiding obstacles (walls) until it finds the black line. It will then position itself on the line and follow it using its infrared sensors
Walk alone
Will simply walk around while avoiding any obstacles in its way.
Interactive Demo
Programs it with the same program that is used in the robot-movement. Doesn’t really do much because there are no controls available in this mode.
Turn left & turn right
Rotates left and right, non-stop.
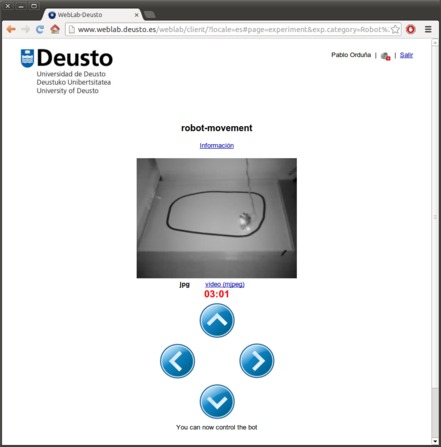
robot-movement¶
robot-movement lets you control a bot remotely. The bot can move forward or backward, and turn to both sides.
To make the bot move, simply click on the appropriate button. Alternatively, you can control the bot by using the arrows on your keyboard. Remember that the bot will move according to its own position, and not to the position of the camera.
The bot will not obey you if it finds a wall in its way, in which case it will try to avoid it.
robot-standard¶
robot-standard lets you program the bot yourself, with any program you wish.
The bot uses a PIC processor, so the program should be written using the Xilinx PIC compiler. It is noteworthy that the bot has, among other things, infrared sensors, to which the developer has access.
The MPLAB IDE used to build the PIC programs can be downloaded for free from http://www.microchip.com.
Specifics¶
The microcontroller model of the robot is a PIC 18F4550. It has two different motors for each wheel. The motors can go either forward or backward. It also has two obstacle sensors, which can be used to avoid the walls, and two infrared sensors, which can be used to detect the line.
Obstacle sensors are set to 1 if an obstacle is detected, while infrared sensors are set to 1 if the black line is detected.
Available pins are set up as follows:
#define motorLeftFwd PORTC,1 ;Forward bit of left Motor
#define motorLeftBck PORTC,0 ;Back bit of left Motor
#define motorRightFwd PORTD,3 ;Forward bit of right Motor
#define motorRightBck PORTC,2 ;Back bit of right Motor
#define obstacleLeft PORTA,3 ;Right obstacle sensor
#define obstacleRight PORTA,2 ;Left obstacle sensor
#define infraredRight PORTA,1 ;Right infrared sensor
#define infraredLeft PORTA,0 ;Left infrared sensor
It is noteworthy that the bot’s firmware relies on a a bootloader, which means that PIC programs must start after a certain number of bytes. This can be seen in the provided example.
Programs should be compiled using absolute addresses (no relocation).
Example¶
The following program makes the robot run back and forth while trying to avoid the walls:
include "p18F4550.inc" ; including the header file of PIC 18F4550
radix hex ; Unspecified literal hexadecimal-encoded
;********************************Label Definition***************************************
#define motorLeftFwd PORTC,1 ;Forward bit of left Motor
#define motorLeftBck PORTC,0 ;Back bit of left Motor
#define motorRightFwd PORTD,3 ;Forward bit of right Motor
#define motorRightBck PORTC,2 ;Back bit of right Motor
#define obstacleLeft PORTA,3 ;Right obstacle sensor
#define obstacleRight PORTA,2 ;Left obstacle sensor
temp1 equ 0x00 ;variable temp1 asociada a registro 0x000 de prop. General
temp2 equ 0x01 ;variable temp2 asociada a registro 0x001 de prop. General
temp3 equ 0x02 ;variable temp3 asociada a registro 0x002 de prop. general
Org 0x200 ; Program begins at address 0x200
;********************************Configuration Section***************************************
movlw b'11111000'
movwf TRISC ;RC0, RC1 y RC2 sets as OUTPUTS
movlw b'11110111'
movwf TRISD ;RD3 set as OUTPUT (Motor ports set as outputs)
setf TRISA ;full PORTA set as INPUT (including sensors)
movlw 0x0f
movwf ADCON1 ;All ports digitals
movlw 0x07
movwf CMCON ;Comparators Off
;********************************Program Starts***************************************
goForward bsf motorRightFwd
bsf motorLeftFwd
bcf motorRightBck
bcf motorLeftBck
detectRight btfss obstacleRight ; if sensor is “1” skip next instruction (no detect)
bra turnLeft ; if previous instruction does not jump turn left
; to avoid de obstacle detected
detectLeft btfss obstacleLeft ; if sensor is “1” skip next instruction (no detect)
bra turnRight ; if previous instruction does not jump turn Right
; to avoid de obstacle detected
bra goForward ;
turnLeft Bsf motorRightFwd
bcf motorLeftFwd
bcf motorRightBck
bsf motorLeftBck
rcall halfSec ;Wait 0,6s
bra detectRight
turnRight Bcf motorRightFwd
bsf motorLeftFwd
bsf motorRightBck
bcf motorLeftBck
rcall halfSec ;Wait 0,6s
bra detectLeft
halfSec Movlw .3
movwf temp1
clrf temp2
clrf temp3 ; Init vars (temp0=8, temp1=0 y temp2=0)
bucle1 decfsz temp1, F ; First loop is repeated 8 times.
bra bucle2
return
bucle2 decfsz temp2, F ; Second Loop is repeated 256 times for each
bra bucle3 ;iteration of the first loop
bra bucle1
bucle3 decfsz temp3, F ; Third bucle is repeated 256 times for each
bra bucle3 ;iteration of the second loop
bra bucle2
;considering that each loop takes 3 cycles internal clock
;(1 jump + 1 decrease), the loop takes 3 * 256 * 256 * 3 = 589825
;as 1 cycle is 1 us, rutine takes aprox. 0.6 s
End
Further details:¶
Full documentation may be downloaded from:
- English: http://www.weblab.deusto.es/pub/docs/robot_module_english.docx
- Spanish: http://www.weblab.deusto.es/pub/docs/robot_module_spanish.docx
- Target audience: engineering students in general, certain secondary schools.
VISIR¶
The VISIR experiment lets you access the BTH OpenLabs VISIR through WebLab-Deusto.
BTH OpenLabs VISIR (Virtual Instrument Systems In Reality) is a Remote Laboratory developed in the Blekinge Institute of Technology, which supports remote experimentation with real electronic circuits.
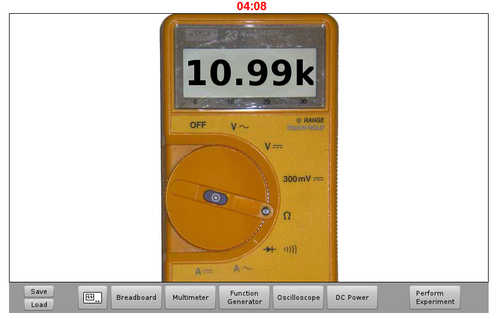
Students create circuits using the web interface, such as the following (where two resistors, of 10k and 1k are placed in serial and connected to the Digital MultiMeter):
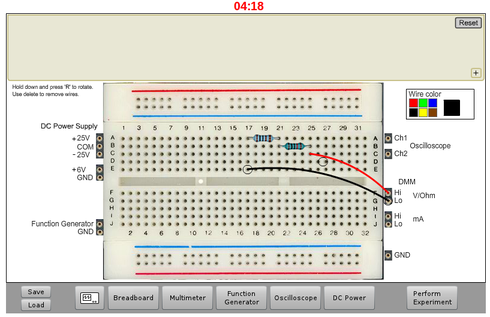
And as a result of this, the digital multimeter will show the sum of the two resistors:
This is possible given that VISIR uses a switching matrix, where all the resistors and other components are located, and with a set of relays it creates the circuit requested by the student:
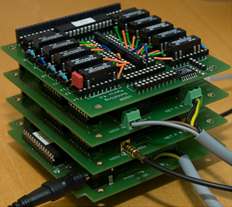
Furthermore, multiple students can access VISIR and take different measurements at the very same time. VISIR will create each circuit and take the measurement each time.
There is more information in the website of the VISIR project or in related papers.
- Target audience: It depends on how many principles are taught. It has been used with secondary school students, as well as with electronics engineering courses.
- Video: http://www.youtube.com/watch?v=vI5aM6Yq3S4
ud-logic¶
ud-logic is a simple game implemented as an experiment. Players are presented with a circuit diagram made up of 6 connected logic gates. Five of these gates show the type of gate: AND, NAND, OR, NOR or XOR. The symbols, as described in the wikipedia, are the following:
| Name | Image |
|---|---|
| AND |  |
| OR |  |
| XOR |  |
| NAND |  |
| NOR |  |
Players must choose the type of the sixth gate so the result of the circuit is 1. Sometimes, several types might yield the desired result, and they will all be considered correct.
When the players succeed, they are awarded one point and a new diagram is generated and they may choose a gate again. The process continues until the time expires or a wrong gate is chosen. When the process finishes, players can see their position in the ranking linked. The more points they get in the provided time, the higher they rank.
This experiment, for demonstration purposes, is usually connected to a hardware board, which can be seen through the provided Webcam stream. Thus, notice that whenever the gate choice is right, a message will appear in the board’s screen, and the LEDs of the board will lit.
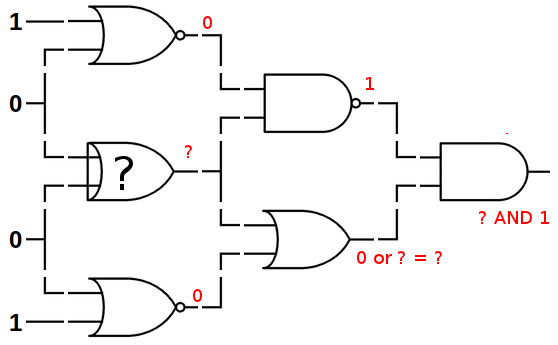
In the example above, in red it is written what the results will be, regardless the value of the unknown gate. For instance, in the upper level, 1 NOR 0 is 0 (1 OR 0 is 1, and not 1 is 0). When solving the whole circuit, it is clear that the final output, which must be 1, is the result of ? AND 1, being ? the result of the unknown gate.
Therefore, we need to have 1 as output of the unknown gate. So the question is: which gate has 0 and 0 as inputs and 1 as output? AND, OR and XOR fail to do this, so the solutions in this case are NOR or NAND.
- Target audience: secondary school students, as well as first course of certain engineerings.
Virtual Machine lab¶
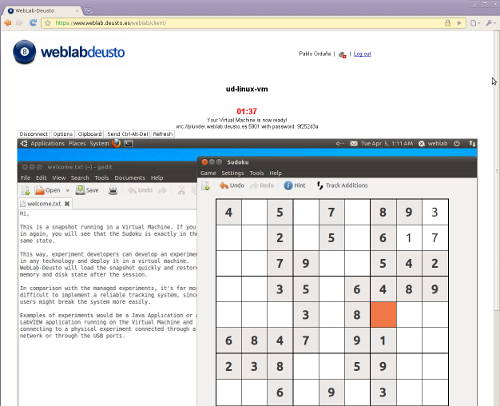
The linux-vm experiment gives you full access to a virtual machine running the Ubuntu Linux distribution.
The user is presented with a few demo programs, among which is a sample Labview application. The user is free to do whatever he wishes on the machine for the assigned time, and the virtual machine will be reset by Weblab to its original state once the session ends. For instance, you can test that the sudoku game running in the virtual machine is always the same, since the state is always restored.
The purpose of this experiment is mainly to showcase WebLab’s ability to host easy-to-develop unmanaged experiments.
More detailed and technical information on VM-based experiments is available here.
- Target audience: It depends on what equipment is used internally. The one running in the demo is only for demonstration purposes.
- Video: http://www.youtube.com/watch?v=b-L2LXRr23A